地址:浙江省嘉兴市南湖区七星街道东进路998号
电话:0573-84611250
手机:134 5639 4362
手机:153 1494 8334

首先是软硬结合。精密夹具解决方案机器人软件比硬件更重要,因为人工智能技术体现在软件中。轨迹规划,车间布局和数字车间的自动加载需要软件和硬件的组合。因此,机器人行业的人才必须同时了解机械技术和信息技术,尤其是机器人的控制技术。第二是现实与现实的融合。重庆精密夹具通过大量的仿真和虚拟现实,可以将虚拟现实与车间中的实际加工过程集成在一起。第三是人机集成。机器人的有机集成如何在行业中值得深入思考。

制止非专业训练人员手动操作,非设备保护人员制止更改机器人速度以及坐标。制止带手套操作电子显现屏。如因保护或许出产过程中需求手动操控机器人,重庆精密夹具应保证机器人行走道路规模没有相关工作人员或许障碍物,机器人速度应有快到慢逐步调整,选用低倍率速度进行手动操作可增加机器人的操控与安全性,防止速度过快形成的机械损坏和损失。精密夹具解决方案齿轮齿条需求定时进行光滑,防止外层发作氧化如因出产需求,需求增加电缆,气管或油管的,请不要使电缆和管道之间扭成麻花状,或许与拖链内部发作过大的冲突,以防止电缆外表磨损管道破裂,形成内部线心暴露发作漏电或影响信号传输。
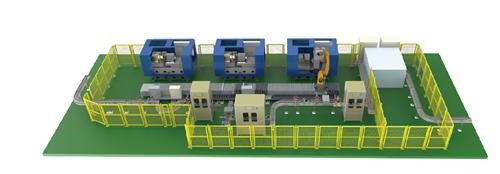
桁架机器人具有以下特点:1.多自由度运动。每个自由度之间的间隔角是直角。2.自动控制,可重复编程,所有动作均根据程序进行。3.品牌精密夹具一般由控制系统,驱动系统,机械系统,操作工具等组成。4.由于操作工具的功能不同,因此灵活而通用。5.高可靠性,高速度和高精度。6,可以在恶劣的环境下使用,重庆精密夹具可以长时间工作,易于操作和维护。7.每个机器人行走轴都可以采用滚柱导轨,该导轨可以高速运行,易于安装和调试,适用于长行程应用,并且可以在恶劣的环境中使用。

力求结构简单,重量轻,体积小桁架式机器人的手位于腕部的前端,其运动状态在工作期间会发生变化。1.它的结构,品牌精密夹具重量和体积直接影响桁架机械手的结构,抓握重量,定位精度和速度。因此,在设计指针时,我们必须力求结构简单,重量轻且尺寸小。2.手指应具有一定的强度和刚度3.有适当的夹紧力桁架机械手在工作时应具有适当的夹紧力,以确保稳定可靠的夹紧,较小的变形且不损坏工件的加工表面。重庆精密夹具对于非常刚性的工件,夹紧力应设计为可调的。对于重工件,应考虑使用自锁安全装置。4.有足够的开合范围握住手的手指被打开和关闭。工作时,一个手指的打开和关闭位置的变化量称为打开和关闭范围。
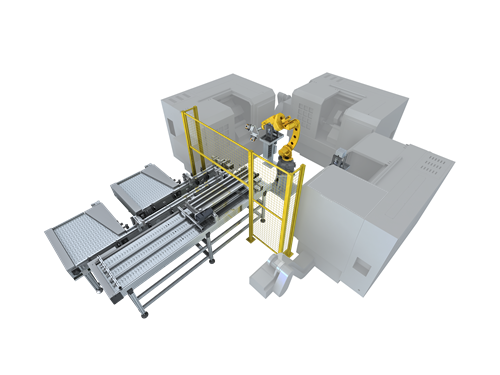
不论二手零件或生产原料如何,数控车床上下料机械手均来自国内外关节机器人正规制造商,质量可靠,受到大家的好评。他们从源头上严格控制了数控车床切割机械手的质量。以及质量,制造商会在将其投放市场之前反复测试其稳定性。重庆精密夹具许多畅销的数控车床切割机械手制造商通常设计和生产各种类型的数控车床切割机械手,例如一对一的轻型上下料机械手,品牌精密夹具一对多的类型的上下料机械手和一对二桁架机械手有多种类型,桁架重载机械手等可供不同用户选择。
地址:浙江省嘉兴市南湖区七星街道东进路998号
电话:0573-84611250
手机:134 5639 4362
手机:153 1494 8334
400-801-3780








