地址:浙江省嘉兴市南湖区七星街道东进路998号
电话:0573-84611250
手机:134 5639 4362
手机:153 1494 8334

一类是不需要手动操作的通用机械手。它是未连接到主机的独立设备。它可以根据任务需要编译程序以完成各种规定的操作。苏州多工位旋转料仓它具有可变程序和独立的驱动控制系统。根据定位和控制方法的不同,分为简单型和伺服型。简单类型是仅点控制,它属于程序控制类型。伺服类型为点控制。第二种类型是使用专用机械手,多工位旋转料仓厂家这些机械手主要连接到自动机床或自动生产线上,用于解决机床的装卸和工件进给。第三类是手动操作,称为操纵器,一般是指由人控制的抓取操作装置,例如锻造操纵器。机械手起源于原子和军事工业。
随着全球制造业转移的持续深入,先进制造业回流,中国的低端制造业面临空心化的风险。而工业机器人是改变制造业空心化的方式之一,苏州多工位旋转料仓通过使用工业机器人参与制造,一方面能解决低端劳动力短缺的问题,另一方面能缩小高端制造业差距,促使中国产业结构的快速调整,逐步进入制造业的高端环节。同时,多工位旋转料仓厂家工业机器人还可以降低企业运行成本,提升企业发展效率,以应对我国制造业面临的生产率较低、人力成本较高等多种挑战。

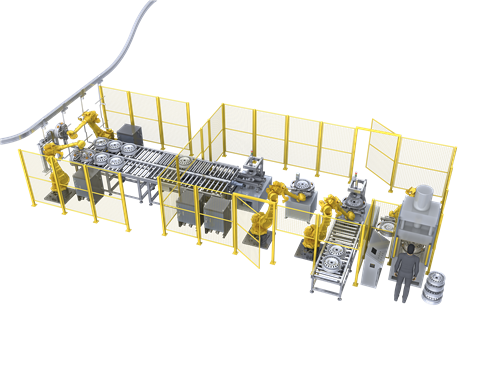
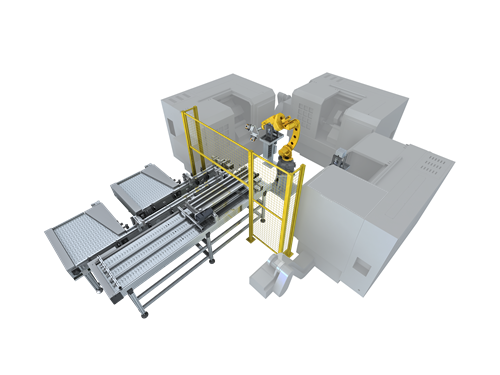
上下料机械手主要实现机床制造过程的完全自动化,并采用集成处理技术,适用于生产线的装卸,工件车削和工件车削顺序。苏州多工位旋转料仓在家用机械加工中,许多现在正在使用专用机床或手动机床进行装卸,这在产品相对单一和生产能力较低的情况下非常适合,但是随着社会的进步和发展,技术越来越进步,产品升级速度加快,专业多工位旋转料仓使用专用机床或手动机床装卸都暴露出许多不足和弱点。一方面,专用机床占地面积大,结构复杂,维修不便,不利于生产自动化装配线;另一方面,它不能适应瞬息万变的变化,也不利于产品结构的调整。
该桁架机械手的基本工作原理是在PLC程序的控制下选择气动传输方式。因此,苏州多工位旋转料仓它可以适应半导体工业并且可以按顺序完成预定的动作,从而使半导体部件达到具有精确值的设定。良好的定位。多工位旋转料仓厂家由于桁架机械手具有自动化功能,因此可用于危险场所,例如核电站,并可避免危险的辐射。在电影和电影仓库中,桁架机械手可以在黑暗环境中准确可靠地运输物料和半成品。
桁架机器人具有以下特点:1.多自由度运动。每个自由度之间的间隔角是直角。2.自动控制,可重复编程,所有动作均根据程序进行。3.专业多工位旋转料仓一般由控制系统,驱动系统,机械系统,操作工具等组成。4.由于操作工具的功能不同,因此灵活而通用。5.高可靠性,高速度和高精度。6,可以在恶劣的环境下使用,苏州多工位旋转料仓可以长时间工作,易于操作和维护。7.每个机器人行走轴都可以采用滚柱导轨,该导轨可以高速运行,易于安装和调试,适用于长行程应用,并且可以在恶劣的环境中使用。
力求结构简单,重量轻,体积小桁架式机器人的手位于腕部的前端,其运动状态在工作期间会发生变化。1.它的结构,专业多工位旋转料仓重量和体积直接影响桁架机械手的结构,抓握重量,定位精度和速度。因此,在设计指针时,我们必须力求结构简单,重量轻且尺寸小。2.手指应具有一定的强度和刚度3.有适当的夹紧力桁架机械手在工作时应具有适当的夹紧力,以确保稳定可靠的夹紧,较小的变形且不损坏工件的加工表面。苏州多工位旋转料仓对于非常刚性的工件,夹紧力应设计为可调的。对于重工件,应考虑使用自锁安全装置。4.有足够的开合范围握住手的手指被打开和关闭。工作时,一个手指的打开和关闭位置的变化量称为打开和关闭范围。
地址:浙江省嘉兴市南湖区七星街道东进路998号
电话:0573-84611250
手机:134 5639 4362
手机:153 1494 8334
400-801-3780








